
论文: Kong T, Sun F, Yao A, et al. RON: Reverse Connection with Objectness Prior Networks for Object Detection[C]// IEEE Conference on Computer Vision and Pattern Recognition. IEEE, 2017:5244-5252.
Github:https://github.com/taokong/RON
论文算法概述
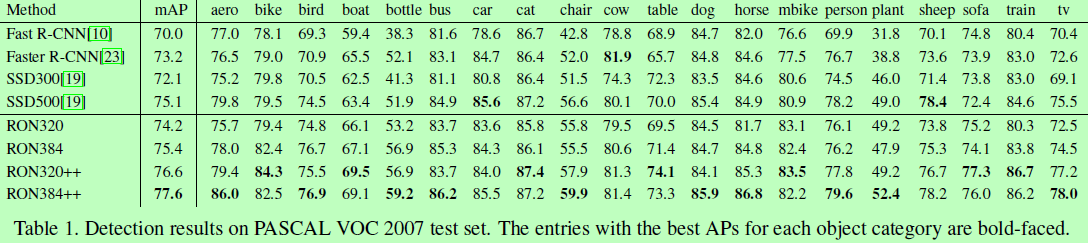
RON,一个端到端的全卷积网络,重点关注多尺度物体检测和难例挖掘两个问题。文中设计了reverse connection使前面的网络层具有更多的语义信息,利用物体先验引导物体的检测搜索,用多任务loss来优化整个网络。实验结果:VOC07为81.3% mAP,VOC12为80.7% mAP,MS COCO为27.4% mAP。

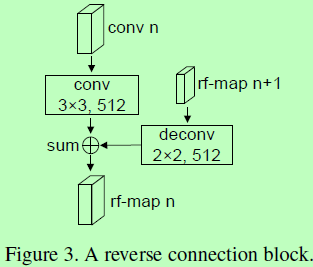
Reverse Connection
对于多尺度检测,region-based的物体检测网络通常会融合多个CNN层到一个特征图,然后基于该特征图用子网络逐区域去检测物体。因为所有物体都基于这个固定特征图去检测,使得优化变得复杂。像SSD则在多个CNN层上进行检测,然而这样前面层的语义信息就会受到限制,从而影响这些层的检测效果,这也是SSD在检测小物体的性能会比检测大物体差很多的原因。
文中提出的reverse connection能使前面的特征图具有更多的语义信息,结构如下图。首先将一个反卷积层应用在reverse fusion map(标记为rf-map)n+1上,再将一个卷积层接到主干的层n上使确保输入具有同样的维度。然后这两个相关的特征图使用element-wise相加进行合并。这 reverse fusion map 7是主干层7的卷积输出(with 512 channels by 33 kernels) 。每个reverse connection block 都会由这样相同的方式生成,如Figure 2所示。总共有4个具有不同尺度的reverse fusion map。与使用单一网络层进行物体检测的方法相比,多尺度特征表达对所有尺度的物体检测更有效,更重要的是因为文中的reverse connection是可训练的,所以前面层的语义信息会得到较明显的加强。
Reference Boxes
取自一个网络中不同层的特征图会有不同大小的感受野,而文中的reverse connection可以生成多个不同尺度的特征图。我们可以设计boxes的分布,使特定特征图位置可以被学习到作为特定尺度目标的网络响应。定义Smin为最小尺度,而尺度Sk为boxes在每个特征图k的尺度, 。并对default boxes使用多个不同的长宽比例{1/3,1/2,1,2,3},那么对于每个特征图位置总共就有2个尺度和5个长宽比。Smin为输入大小的1/10(即为32对应输入图像为320x320的模型)。
。并对default boxes使用多个不同的长宽比例{1/3,1/2,1,2,3},那么对于每个特征图位置总共就有2个尺度和5个长宽比。Smin为输入大小的1/10(即为32对应输入图像为320x320的模型)。
Objectness Prior
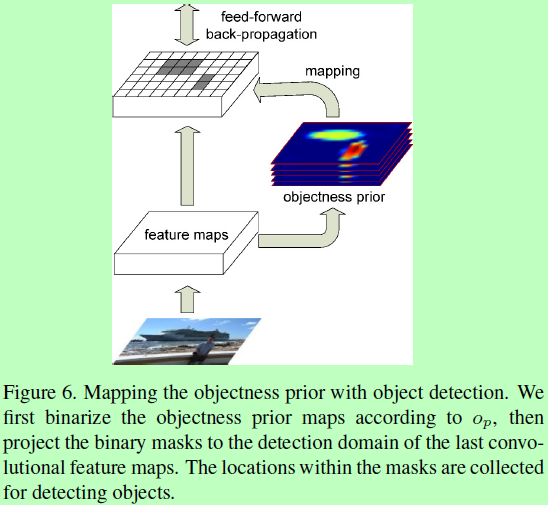
上面考虑了很多不同尺度和长宽比的候选框,但只有少数会框住目标,换句话说就是正负样本严重不均衡。region-based的方法使用RPN来处理这个问题,但region proposals相对于default boxes会额外引入平移变化。所以在Fast RCNN中会使用region-wise networks,这样就引入了重复的计算。而相反,我们加入了目标先验去引导目标的搜索,而不需要生成新的region proposals。具体地就是添加一个3x3x2的卷积层,随后接一个softmax去指出在每个box里面存在的目标。目标先验图的通道数是10,即在每个位置上会有10个default boxes。如图1显示的是由一张图像生成的多尺度的目标先验。为了可视化,目标先验图由通道的维度上取均值,可以看到这目标先验图中可以明显地反映出一个目标的存在。因此目标的搜索范围可以得到极大的缩小,而不同尺度的物体将会响应到它们各自对应的特征图上。
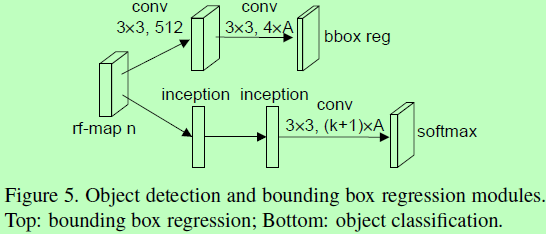
Detection and Bounding Box Regression
与目标先验模块不同,检测模块需要将regions分成K+1类,具体如下图5所示。
Combining Objectness Prior with Detection
在网络的训练和测试阶段都会使用到目标先验。在训练时,先给每个由上面Reference Boxes中得到的候选区域一个二值类别标签,如果该区域覆盖着目标,则再赋予一个类别标签。对于每个ground truth box,首先对于每个GT找到与之有最大jaccard重叠度的候选框,然后将对每个候选框以jaccard重叠度超过0.5为阈值去匹配GT。这样能保证每个GT box都会有至少一个region box与它相对应。而对于重叠度小于0.3候选框的给予负标签。这样每个候选框就有两个标签了,一个为是否目标,一个为目标类别。在训练阶段,网络会基于目标先验去动态更新目标标签。对测试阶段的每个mini-batch,网络会同时进行目标先验和类别检测,而在反向传播时,网络首先会生成目标先验,然后对于检测,样本的是否为目标的分数需要高于预先设定的阈值才进入计算。反向传播中额外的计算在于样本的选择上,当选择了合适的阈值(文中的是0.03)后,只有少数样本会被选择进行反向计算。
Training
对于目标先验,所有的正样本都会用于训练,而负样本则随机抽取一部分,使正负样本比例为1:3;对于检测,首先通过目标先验的评分来减少样本数量,然后也同样选择全部正样本,随机抽取负样本使比例为1:3。
Inference
在分类置信度定义为目标先验评分乘上基于目标先验的类别评分: 。再通过bounding box的回归输出去调整方框位置,最后使用NMS得到最终结果。
。再通过bounding box的回归输出去调整方框位置,最后使用NMS得到最终结果。
Experiments

总结
部分网络结构与DSOD类似(多层预测加跨层特征融合)。RON中的R是Reverse Connection反向连接,O是Objectness Prior目标先验。
反向连接是为了让网络具有更多的语义信息,具体是将下层的特征图通过反卷积扩大分辨率后与上层特征图合并,达到跨层特征融合的目的。
目标先验以引导目标搜索,减小搜索空间且不需要生成新的proposla。在选取的多层网络的特征图上,每层对应生成一个分辨率一致的通道数为10的目标先验图(10个default box对应10个通道)。由该先验图来判断所有区域是否覆盖着目标。