
论文:Ren S, He K, Girshick R, et al. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks.[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2016:1-1.
代码matlab:https://github.com/ShaoqingRen/faster_rcnn
代码python_1:https://github.com/rbgirshick/py-faster-rcnn
代码python_2:https://github.com/rbgirshick/fast-rcnn
代码C++: https://github.com/YihangLou/FasterRCNN-Encapsulation-Cplusplus
译文推荐:http://www.2cto.com/kf/201604/503750.html
论文算法概述
提出了一种Region Proposal Network (RPN),共享目的是为了共享fast-rcnn物体检测网络中卷积特征的计算,以实现低运算量提取目标区域,解决Fast-RCNN和SPP-net中候选框提取速度慢的问题。RPN是一个端到端的全卷积网络,以任意大小的图像作为输入,只需在最后的卷积层上滑动一遍,可以同时预测物体的区域和在各区域的objectness scores(“Objectness” measures membership to a set of object classes vs. background),替换selective search应用到fast-rcnn中。RPN同时也提高了候选框的质量,使检测更准确。
RPN
为产生目标区域,在网络的最后一层共享卷积层(如ZF的第5层或VGG的第13层卷积层)中产生的卷积特征映射图上滑动一个小网络,这个小网络与输入的卷积特征图的n x n的空间滑动窗口进行全连接,滑动窗口每个都映射出一个低维向量,如在ZFnet中最后一层卷积层为256个特征图,则输出256维向量:一个3×3窗口在一个特征图的一个位置上输出一个节点,共256个特征图,则有256个节点,得到1×256的向量,这向量输入到方框回归器reg和分类器cls两个关联的全连接层中(无论有多少个特征图都只滑动一次,特征图个数等于输出向量维度)。文中滑动窗口设为n=3,这小网络滑到一个位置时如图所示。因为这小网络是以滑动窗口的形式使用的,即这全连接的网络层可以被所有空间位置共享。它的网络结构是由n x n的卷积层加上两个滑动的1 x 1的卷积层(for reg和cls)。ReLU应用于n x n卷积层。
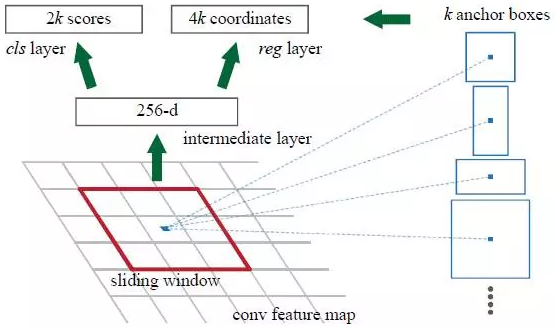
更具体地说,该滑动窗口在以下网络上,用步长为1的3x3卷积来实现,即rpn_conv/3x3。256-d为下图中rpn_conv/3x3的输出特征图个数,即每个位置的3x3x256卷积操作得到1x1x256d。
假设rpn_conv/3x3的输出为m x n x 256,外接1x1x18卷积,则输出分类特征图大小为m x n x 18,即特征图上每个点会得到2x9=18维度的向量,表示该位置点上的每种anchor是否含有目标。同理用1x1x36卷积得到m x n x 36边框预测特征图。

旋转不变的Anchors
在每个滑动窗口位置,同时预测k个目标区域,因此reg层输出k个boxes,cls输出2k个分数(是目标的概率和非目标的概率);每个anchor在滑动窗口的中心,与一个尺度和长宽比相关联。文中采用3个尺度(128,256,512)和3种长宽比例(1:1,1:2,2:1),则在每个滑动位置点上可产生k=9个anchors。一个卷积特征图大小为W x H,则有W x H x k个anchors,具有旋转不变性。
损失函数
在训练RPN时,给每个anchor设置一个二值化类别标签(是/否物体),其中与一个真实物体区域具有最高的Intersection over-Union (IoU)重叠或与任意的真是物体区域的IoU超过0.7的anchor标记为“是”;而与任何物体真实区域的IoU都不超过0.3,则为“否”;介于“是”与“否”之间的舍去不做训练。训练时遵循Fast-RCNN中的多任务loss,损失函数如Fast-RCNN相似,并以与以往不同的方式实现了其中的bounding-box回归,详看论文。
训练优化
RPN是全卷积网络,由方向传播和随机梯度SGD进行端到端训练。每个mini-batch由一张图像上随机抽选的256个正和负样本候选框组成,并使正负样本比例约1:1,否则负样本很多可能会使bias倾向于负样本。使用0均值0.01标准差的高斯分布对所有新网络层进行初始化,而其他层由预训练模型提供,进行finetune。
共享卷积特征
这里检测网络采用的是Fast-RCNN,而RPN和Fast-RCNN的训练相互独立,现在是想让它们之间共享卷积特征以减少预测时的计算量。但Fast-RCNN的训练是基于固定候选框,在训练Fase-RCNN的同时调整候选框则无法确定网络训练是否会收敛,因此设计一个包含有Fast-RCNN和RPN的网络并简单联合使用反向传播训练是不容易实现的。文中采用的方法含4个步骤:
- 照常训练RPN,使用预训练模型进行初始化并对候选框做端到端finetune。
- 使用RPN产生的候选框对Fast-RCNN进行训练,Fast-RCNN也采用ImageNet的预训练模型进行初始化。
- 使用Fast-RCNN网络去初始化RPN的训练,固定卷积层微调RPN独有的网络层。这样两个网络就共享卷积层了。
- 保持共享卷积层固定,去对Fast-RCNN的全连接层进行finetune。
总结
主要是提出了RPN,代替了Fast-RCNN上的使用的selective-search,其余结构未变。而RPN中设定3个尺度和3个形状组成9个anchors,以滑动窗口的方式搜索目标。其中滑动窗口以n x n卷积实现,卷积输出多个特征图,即使每个滑动窗口得到一个多维向量。然后再用1x1x18和1x1x36卷积去扫描,分别得到对应每个位置上9个anchor的类别和边框的预测。