
模版匹配概念
与常用的字符串匹配相类似,如对于简单字符,可将其归一化后,选一相应的开始点后,依次遍历相乘,相同的目标点相乘为1,目标点与非目标点相乘为0,可计算出相似程度。
在OpenCv和EmguCv中支持以下6种对比方式:
-
CV_TM_SQDIFF 平方差匹配法:该方法采用平方差来进行匹配;最好的匹配值为0;匹配越差,匹配值越大。
-
CV_TM_CCORR 相关匹配法:该方法采用乘法操作;数值越大表明匹配程度越好。
-
CV_TM_CCOEFF 相关系数匹配法:1表示完美的匹配;-1表示最差的匹配。
-
CV_TM_SQDIFF_NORMED 归一化平方差匹配法
-
CV_TM_CCORR_NORMED 归一化相关匹配法
-
CV_TM_CCOEFF_NORMED 归一化相关系数匹配法
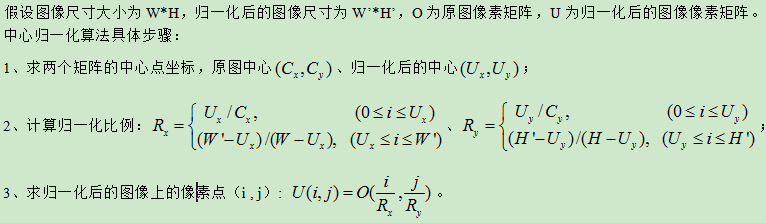
图像尺寸大小归一化用于模板匹配
SSDA-序贯相似性检测
一种改进的图像模板匹配方法:SSDA算法的相似性判决指标为图像像素灰度差的绝对值之和: 
步骤:
-
预先设定好一个阈值序列thresh(n),在匹配的时候,用模板遍历整个图像;
-
每当模板到一处地方的时候,随机抽取k个像素点计算相似度e(u,v,k)并与Thresh(k)进行比较,若e(u,v,k)<thresh(k)则继续抽取,k++,直到e(u,v,k)>=thresh(k)时停止,记下k;对不同的待匹配点进行上述匹配计算,最后取最大的 k值对应的待匹配点位置,认为这就是需要找的匹配点。
SSDA 算法与一般的穷尽搜索算法的最大区别是:它不需要计算所选区域中所有点引起的误差之和,而是计算部分误差和序列 e,将 e 与一个已经定义的误差阈值序列比较,如前 m 个点引起的误差和大于第 m 个误差阈值时,停止计算,换下一个点进行匹配。但该方法的阈值选择较困难,阈值选取的好,处理速度快、跟踪准确。阈值选取过大,处理速度提不高;选取过小,跟踪又不准确。所以实际运用中多采用自动阈值。