
Hough
一:
-
在图像中检测直线的问题,其实质是找到构成直线的所有的像素点。那么问题就是从找到直线,变成找到符合y=mx+b的所有(x,y)的点的问题。
-
进行坐标系变化y=mx+b,变成b=-xm+y。即b为y轴,m为x轴,直线上的点(x1,y1),在转换坐标系后为一条直线。
-
直线上每一个点在MB坐标系中都表现为直线,而且,这些直线都相交于一个点,(m,b)。找到所有点的问题,转变为寻找直线的问题。
-
对于图像中的每一个点,在MB坐标系中对应着很多的直线。找到直线的交点,就对应着找到图像中的直线。
在m为无穷大时无法使用,在实际使用时,用极坐标来做。如2
二:
在将直角坐标系转到极坐标系中,图像空间中的每一个点(x,y)就会被映射为一个空间中的正弦曲线,而图像空间中共线的点所对应的
空间中正弦曲线相交于一点
,
为每一个点假设n个方向的直线,通常n=180,此时检测的直线的角度精度为1°,利用公式分别计算这n条直线的
坐标,得到n个坐标点。如果要判断的点共有N个,最终得到的
坐标有Nxn个。有关这Nxn个
坐标,其中
是离散的角度,共有180个取值。统计
的出现次数,设定一个阈值,次数高于这个阈值而认为是一条直线。
推导:,则垂线的斜率为
,则原直线的斜率为
(1);设直线上任意点为(x,y),则斜率为
(2);结合(1)(2)可得
。
LSD 链接
一种新的直线段检测算法,《LSD: a Line Segment Detector》发表于PAMI2010。LSD的核心是像素合并于误差控制。号称是能在线性时间(linear-time)内得到亚像素级准确度的直线段检测算法。
LSD的计算步骤:一、图像缩放;二、梯度计算;三、梯度排序;四、梯度阈值;五、区域增长;六、矩形估计;
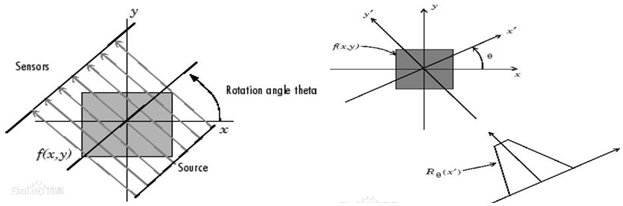
Radon变换(拉东变换)
Radon 变换定义在任意空间域,一个 n 维函数的Radon变换定义为n-1维超平面上的积分值。若考虑 n=2 的特例,Radon变换是计算图像在某一指定角度射线方向上投影的变换。可看成是先将图片旋转一定角度后将其对x轴进行积分。旋转图像如下:
,
,后将其沿着x轴积分。
一个最简单而直接的应用就是拿来检测图像里面含有的直线成分,很显然地,任何直线都会导致Radon像在该直线对应(d,α)处的极值。
Hough变换检测圆
因为直角坐标系上有,则在参数空间中有
;所以圆可以表示为
,则在参数空间中可表示为
,先设定一个三维累加器A(a,b,r),对图像上每一个前景像素点带入式子的x、y中, 由360度遍历,r由给出的范围遍历,将得到的(a,b,r)对累加器A(a,b,r)进行累加。
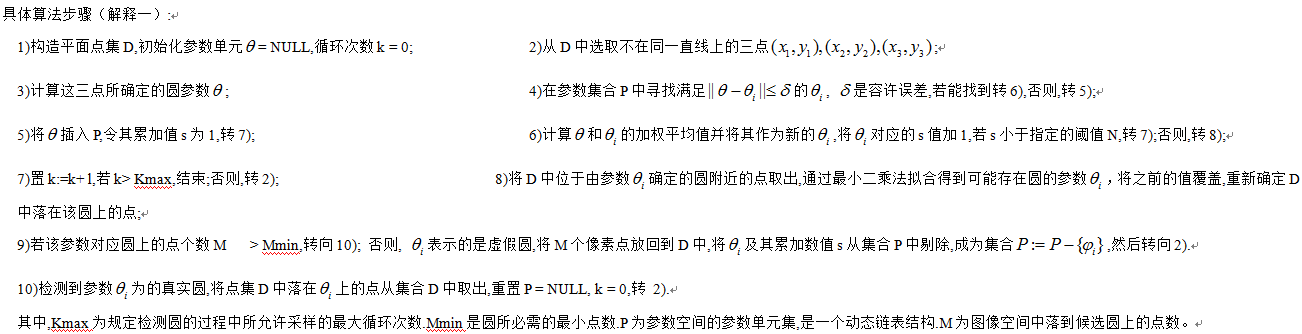
圆检测的标准RHT(随机Hough变换)
设平面点集D包含一个或多个不同的圆,标准RHT的基本思路是:反复从D中随机选取不在同一直线上的三个点,利用这三点确定圆的参数,其中(a,b)为圆心,r为半径,并设置一个累加器S,将每次计算所得的圆参数和累加器中的数值放入参数集
中.当 对应的累加值s超过指定的阈值N时,利用最小二乘法将这些点拟合得到新的参数
,重新确定D中位于由
确定的圆上的点,若此点数超过一个圆为真实圆时所需的最小点数,则可以确定参数为
的圆是真实圆.继续循环,直到检测出所有圆。(随机抽3个数,设置参数累加器(允许误差),累加达阈值则重新拟合,点数够的为圆)
–
