概念
CART采用一种二分递归分割的技术,构建决策树时通常采用自上而下的方法,在每一步选择一个最好的属性来分裂。将当前的样本集分成两个子样本集,使得生成的决策树的每个非叶子节点都有两个分支。CART算法生成决策树是结构简洁的二叉树。
CART算法的原理与ID3相似,在CART中提出了杂度削减的概念,按杂度削减最大分裂节点生长决策树,与ID3不同的是,CART最终生成二叉树,然后利用重采样技术进行误差估计和树剪枝,然后选择最优作为最终构建的决策树。其中对于度量结点的不纯度通常有以下指标:Gini、熵、误分类误差。而在CART中使用Gini指标。(注意:C4.5算法与CART类似,也是先建树后剪枝,但具体实现上不同)
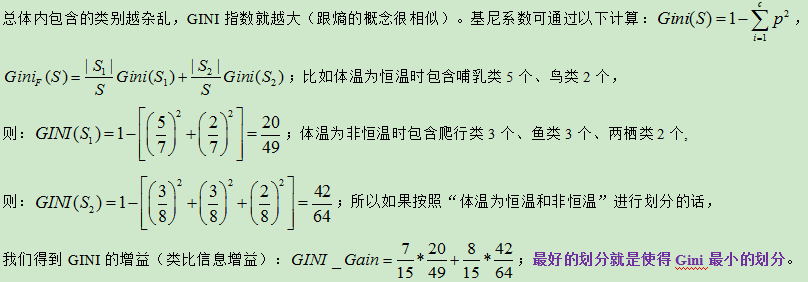
GINI(基尼)指数
生长划分终止条件
-
所有的叶结点的样本数为1或者样本属于同一类;
-
决策树高度达到用户设置的阈值;
-
节点中样本个数少于用户指定个数;
-
异质性指标下降的最大幅度小于用户指定的幅度。
树剪枝技术
当分类回归树划分得太细时,会对噪声数据产生过拟合作用,剪枝的主要目的就是防止树的过拟合。剪枝又分为前剪枝和后剪枝:前剪枝是指在构造树的过程中就知道哪些节点可以剪掉,于是干脆不对这些节点进行分裂;后剪枝是指构造出完整的决策树之后再来考查哪些子树可以剪掉。在分类回归树中可以使用的后剪枝方法有多种,比如:代价复杂性剪枝、最小误差剪枝、悲观误差剪枝。
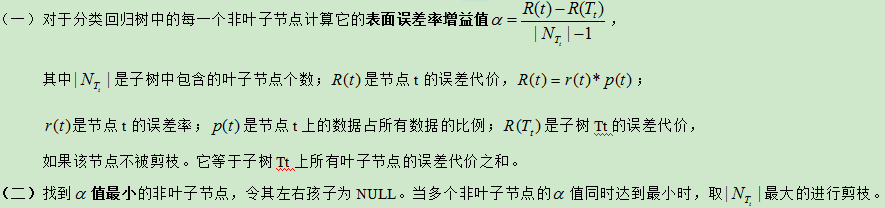
代价复杂性剪枝CCP(Cost-Complexity Pruning)
标准是分类书的简单误分类(基于验证数据的)加上一个对树的大小的惩罚因素。具体如下:
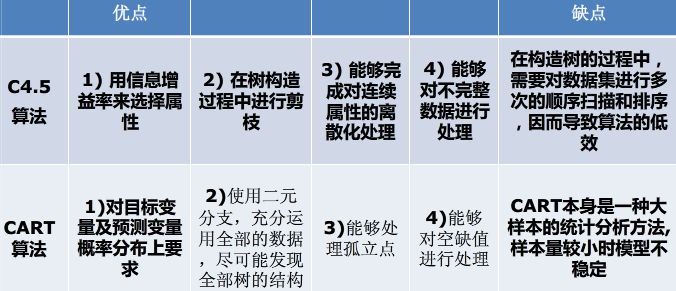
ID3、C4.5和CART的区别
ID3和C4.5都是基于决策树和信息论基础,C4.5是ID3的延伸与改良,而C4.5和CART的区别如下: