
论文: Facial Landmark Tracking by Tree-Based Deformable Part Model Based Detector[C]// The IEEE International Conference on Computer Vision. IEEE, 2015:963-970.
项目主页(含代码): http://cmp.felk.cvut.cz/%CB%9Curicamic/clandmark/
论文算法概述
该跟踪器在视频每帧中独立使用静态图像关键点检测器,并采用卡尔曼滤波器去平滑人脸区域位置和降低人脸检测的失败率。而其中的静态关键点检测器使用的是由Structured Output SVMs训练而来的基于树的可变型部件模型DPM。基于树的DPM可由动态规划来得到全局推理过程,从而不会遇到在复杂形状模型中常遇到的问题陷入局部最优解; 基于树的DPM的主要使用问题是由组合推理造成的运算时间长,可以使用由粗到细的搜索策略来减轻。
-
静态图像的关键点检测器:基于DPM,构建一个无向图模型,特征描述子由多尺度金字塔的稀疏局部二值模型(S-LBP)得到,使用SLBP主要是精度和速度之间的权衡。
-
关键点检测器训练:由于是线性参数化,评分结果也是线性的,需要训练一个线性分类器,使用全监督的tructured output SVM (SOSVM)。使用Bundle Methods for Regularized Risk Minimization (BMRM)算法进行求解。
-
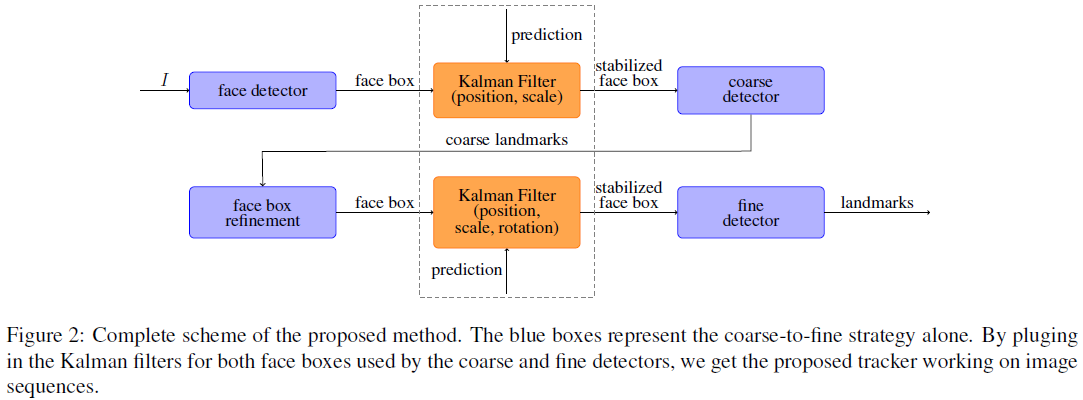
粗到细的搜索策略:训练了两个分类器,(粗)一个输入图像为80 x 80,关键点的patchsize为13 x 13,用于限制人脸检测与得到脸部检测子; (细)检测器被使用160 x 160的图片,150 x 150的patchsize。具体如下图2所示。
-
用kalman滤波器稳定人脸检测:前面定义的基于静态图像的处检测器,为了可扩展到视频流处理,我们需要解决一些人脸检测器可能存在的问题。特别地,使用了应用于商业的Waldboost face detector。然后使用kalman滤波器去估计人脸检测框。
使用感受:
-
每帧都检测,检测速度较快,但不稳定,关键点跳动大;
-
需要训练多个角度的不同模型,适合用于获取左右偏转情况,做正脸提取,而不太适合用于包含上下角度的姿态估计,可能是模型训练问题导致脸部倾斜无法检测。